今回は「負帰還の安定性」について触れてみたいと思います。
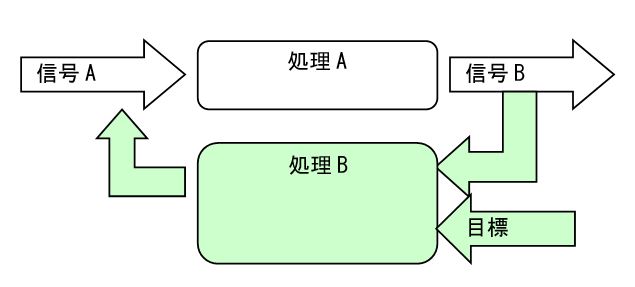
負帰還は、戻ってくる値が入れた信号に対して負(つまり、反対)なので、負帰還といいますが、負ではなくなると「正帰還」になります。正帰還は入力した信号と同じ向で信号が帰ってくるので、いっそう入力信号は強調されます。その結果、「発振」という現象が起きます。
意図して発振するのはいいのですが、そうでない場合は・・・いろいろと問題が起きます。
発信器を作ろうとするとなかなか安定した発信ができないのに、発信しなくても良い所で安定して発振する発信器を作ってしまった経験がある方もいると思います。
不期間が不安定の時はどんなことが起きるのか、一例を紹介してみたいと思います。
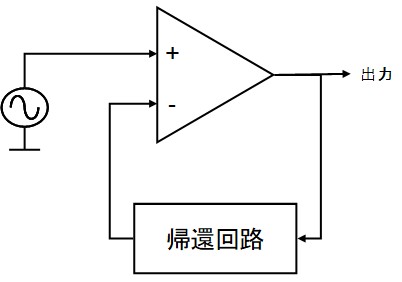
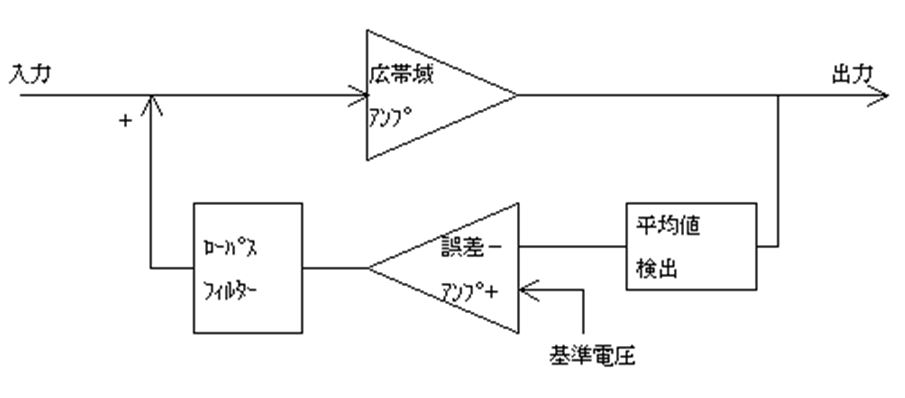
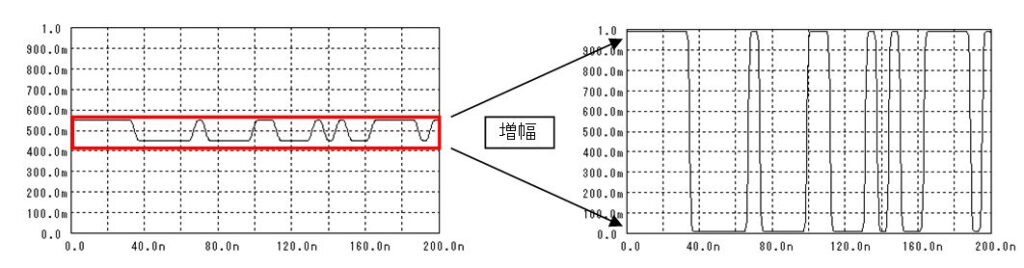
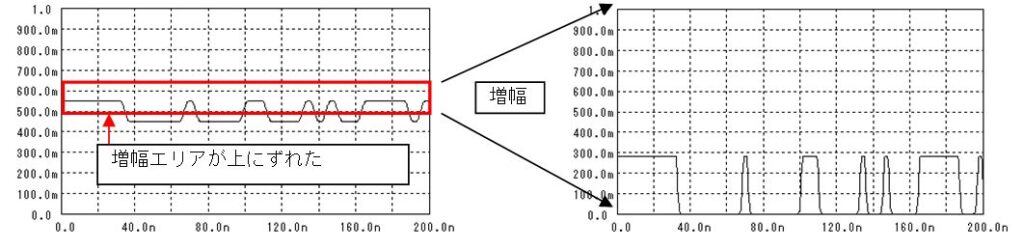
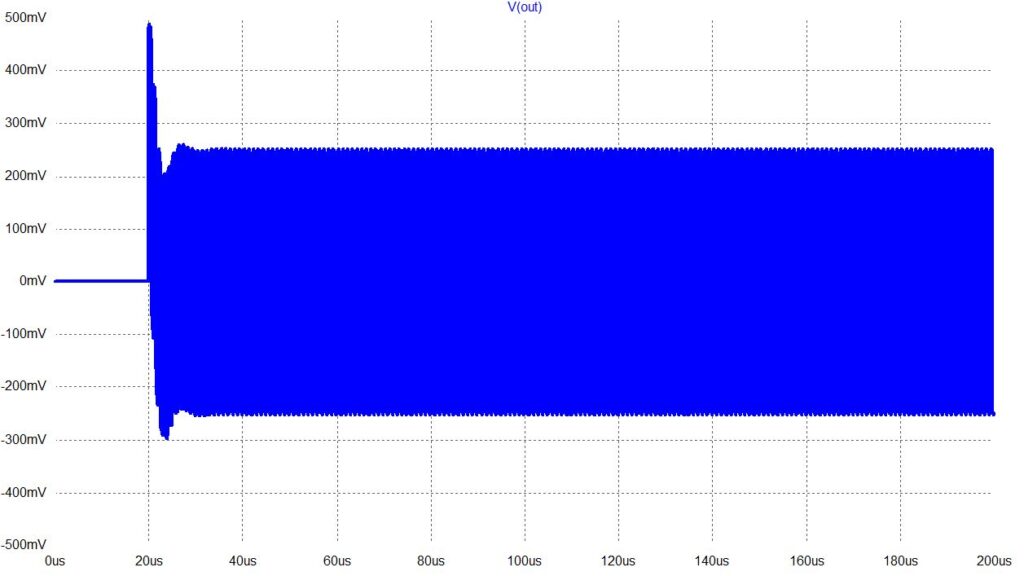
不調をうったえる上のような帰還回路がついている増幅器の出力波形を見たら下のような波形が出ていて、
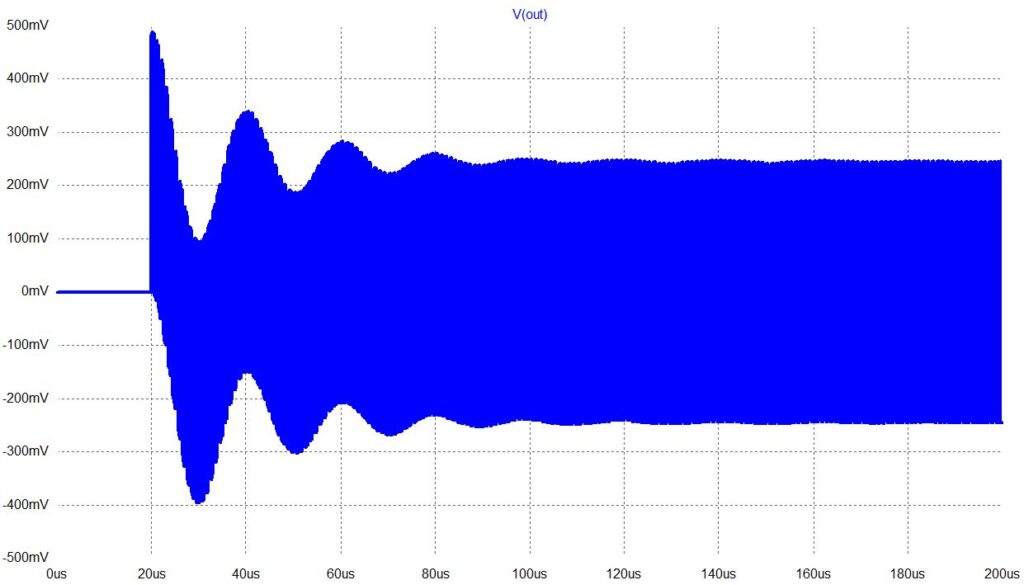
不調の原因はこの”うねり”じゃないかと思って、波形に続いて周波数特性を取ってみると・・・
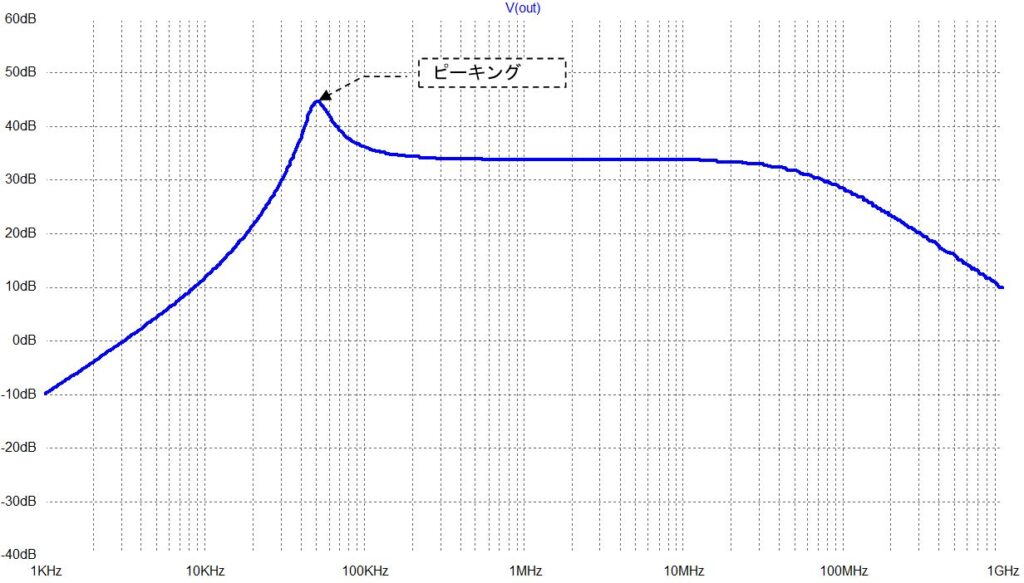
50kHzあたりにピーキングが出ている事が分かりました。どうもこのピーキングが原因のようです。
帰還回路で発生するこういった問題の原因を調べるのに「ボード線図」言うものがあります。
ボード線図は、横軸に周波数、縦軸に利得と位相を書いたグラフです。

ボード線図を書くには、帰還回路の一部を切って(ループを開いて)信号源を入れます。
この信号源の信号がどのような振幅と位相で元に場所に戻ってくるかをプロットします。
つまり、A点の信号がどのくらいの大きさになって、また、どのくらい遅れてB点に戻ってくるか と言うことを周波数を横軸にして調べた結果が「ボード線図」です。

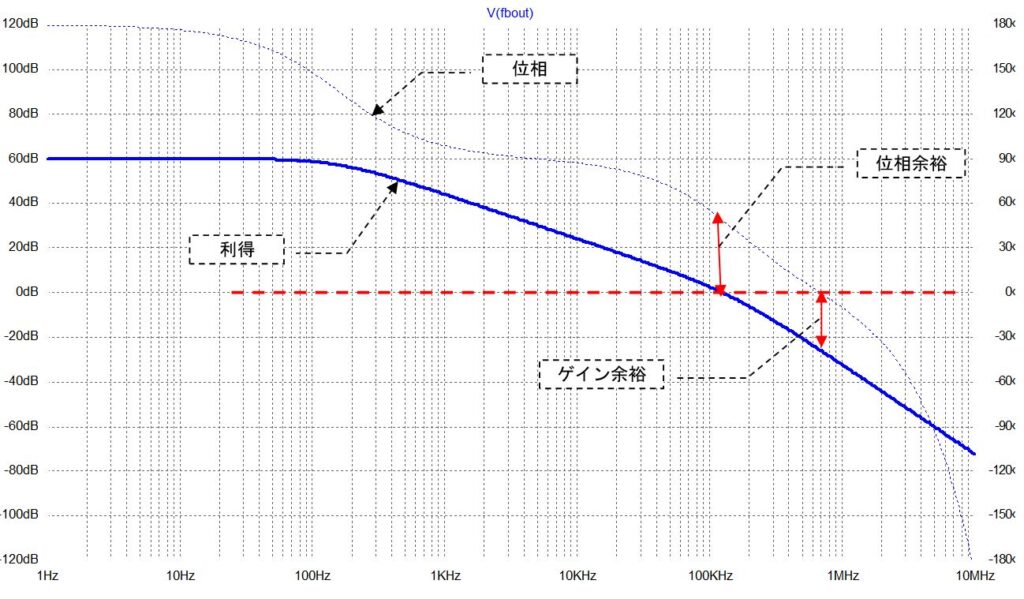
負帰還が安定して動作するかを判定する重要なパラメータが、「位相余裕」と「ゲイン(利得)余裕」です。
「位相余裕」は利得が0dBとなったときに、どれだけ位相が0°に対して残っているかを言い、
「ゲイン余裕」は、位相が0°になった時に、どれだけゲインが0dBから負の値になっているかを言います。
どちらのパラメータも、“位相が0°の時に利得を正にしないこと” をチェックするものです。
位相が0°であるという事は、A点と同じ位相でB点に信号が戻ってくることを意味していますし、利得が正という事は、A点から入力した信号が減衰しないでB点に帰ってくる事です。
入れた信号と同じタイミング(位相)で、入れた信号より大きな信号が戻ってきて加わったら、信号はどんどん大きくなり・・・発振が始まってしまいます。
位相が0°の時に利得を正にしないことは、発進しないための条件です。
(逆に、位相が0℃の時に利得を正に保つこと が発振し続けるための条件です)
上の例では、ゲイン余裕は20dB以上ありますが、位相余裕が15°程度しかなく、これがピーキングの原因であったと言えます。
また、ピーキングの出る周波数(50KHzくらい)は、利得=0dBとなる周波数とほぼ同じになります。
位相余裕が足りないので、回路を修正して位相余裕を確保してみましょう。
(どのように回路を直したかは、周波数特性と部品定数の関係を含めて、別の機会に説明したいと思います)
位相余裕が50°程度まで増え増した。この状態で、負帰還回路を閉じてアンプの周波数特性と波形を観測してみると・・・
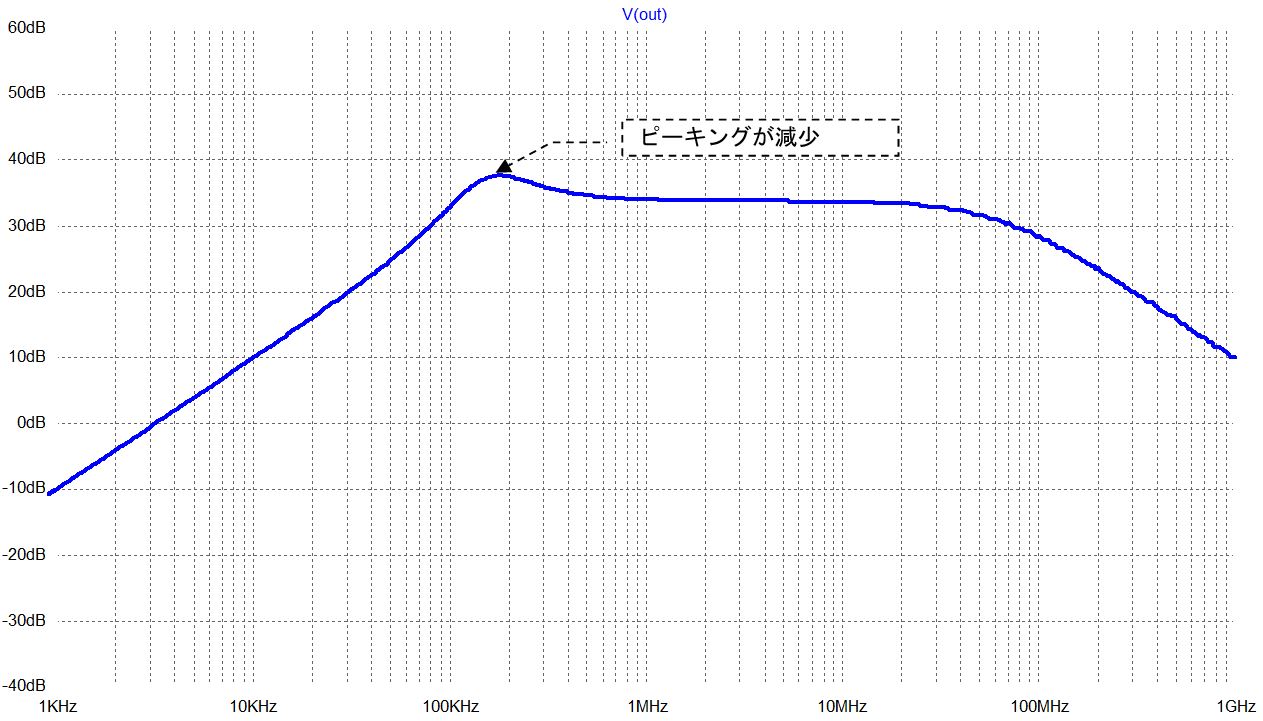
ピーキングが減って、”うねり”の時間も量も少なくなったことが分かると思います。
次回は今回触れなかった「ゲイン余裕」に触れながら、位相余裕やゲイン余裕を改善するために行う「位相補償」について
話してみたいと思います。