
前回記事からの続きです。前回記事は↓からどうぞ。
近年、スマートフォンや自動運転車、産業用ロボットなど、さまざまな分野で使用される技術が急速に進化しています。その中でも「TOFセンサー」という言葉を耳にする機会が増えてきました。
TOFセンサーは、低コストで解像度も粗めなので、安全でプライバシーに配慮したトイレ見守りも可能になっています。本記事では、TOFセンサーとは何か、その基本的な仕組みから具体的な活用方法までをプロフェッショナルな視点で解説するとともに、PoCの製作を通じ、効率的なトイレ見守りシステムを提案します。
TOFセンサーの概要
TOFセンサー(Time of Flight Sensor)は、物体までの距離を正確に測定する無線測距技術です。「Time of Flight」とは「飛行時間」を意味し、光や電波が発信されてから物体に反射して戻ってくるまでの時間を計測することで距離を無線で算出(無線測距)します。この技術は、高精度な測距が可能であり、様々な応用分野で利用されています。
TOFセンサーの無線測距技術
TOFセンサーでは、短い光パルス(通常は赤外線)が物体に向けて発信されます。パルスが物体に反射して戻ってくるまでの時間を高精度で計測し、その時間から無線測距します。高速での測距が可能であり、動く物体の検出にも適しています。
このTOFセンサーはアクティブセンサーであるため、暗所などの環境でも測距できます。 センサーのTX(送信)部はレンズ技術を用いて赤外線をバースト送信(図の緑線)し、8ピクセルの平面グリッド列を形成します。
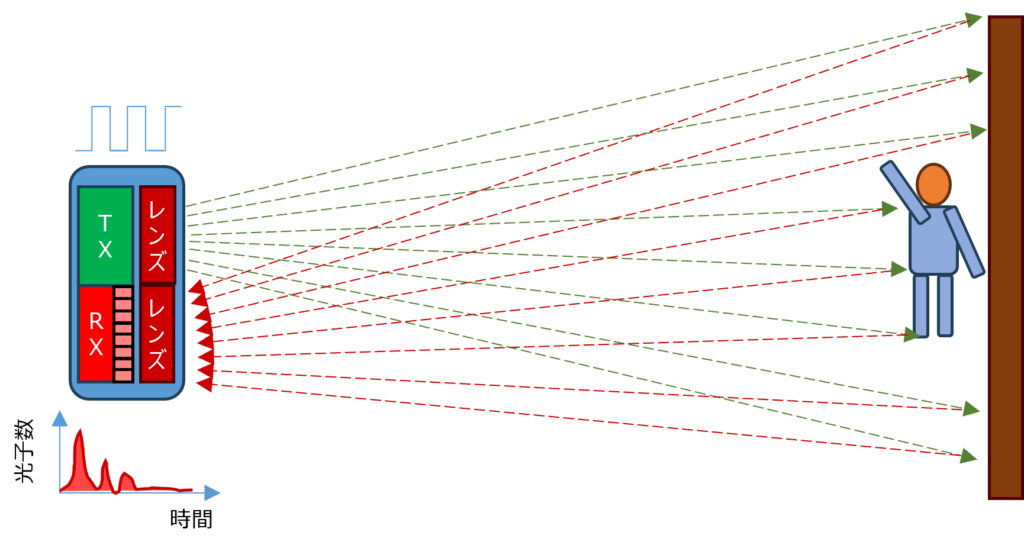
物体に反射した赤外線はRX(受信)レンズを通過し、赤外線検出器のアレイに導かれます(図の赤線)。検出器は、一定の時間間隔ごとに赤外線の到達時間と数を記録します。 その出力は、時間間隔ごとの赤外線光子数のヒストグラムとなります。このヒストグラムのピーク情報と時間データを用いることで、各検出器ごとの物体までの距離を無線測距できます。赤外線光の速度は光速と同じであるため、センサーは非常に短い時間間隔で無線測距します。
TOFセンサーでトイレ見守りPoCを作る
TOFセンサーをトイレの天井に設置します。通常は高さ2.2メートルから2.8メートルの範囲に配置されます。

下図中央のようなレイアウトだと、左図のように壁やトイレなどの特徴がセンサー画像に映りますが、それらの位置は分かっているため、TOF画像で見ても理解はしやすいです。
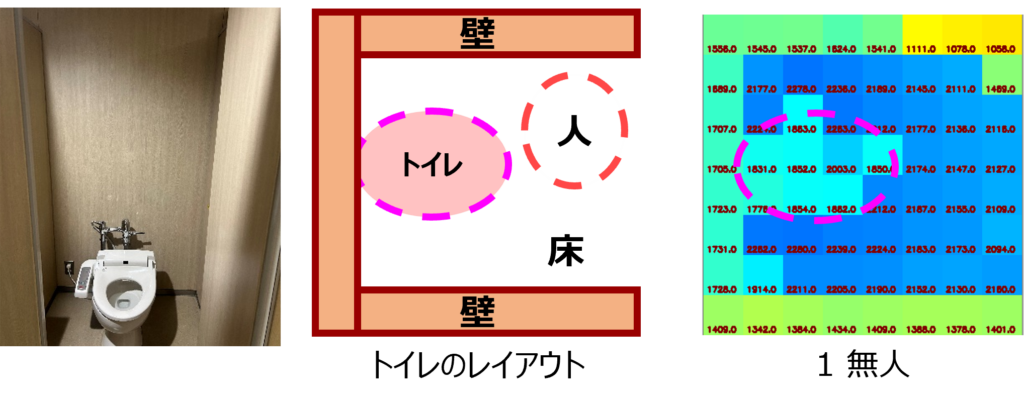
ただし画像の解像度が低いため、トイレの曲面などの細かい形状は認識できません。
トイレ内の物体の動きはどう判断されるのか
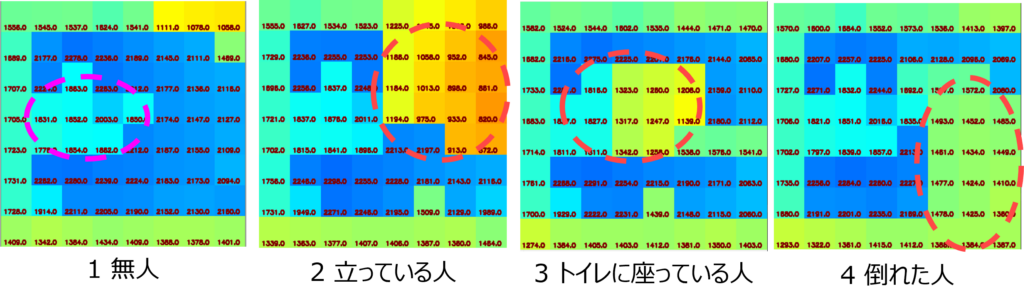
一番右の図の無人のトイレ個室のTOF画像と、それぞれ人がいる状態の画像をリアルタイムに比較することで、個室内に何かがあることが判断できます。
- 無人
- オレンジ色のピクセルは、人が立っているエリアを示します。
- 黄色のピクセルは、人が座っているエリアを示します。
- 緑色のピクセルは、人が倒れているエリアを示します。
このように、低解像度のTOFセンサーでも、トイレ内のどこかに何か(または誰か)がいるかを推測できます。また、物体の大きさや高さ(天井に近いのか、床に近いのか)も推測可能です。ただし解像度のため、センサーのみでそのものずばりを人か否かと判別することまではセンサーではできません。この点は予めご理解ください。。
AIモデルの登場
このように無人のトイレのTOFセンサー画像と他のリアルタイムのトイレのTOFセンサー画像を比較するだけで、人間が見て物体(人)の位置や状態を判断できるのであれば、AIを使っても同様に判断できるはずですね。この考えをもとに、私はシンプルなAIモデル を開発しました。次回はそのAIモデルについてお話しします。